हाईवे पर ट्रकों का एक बेड़ा ड्राइविंग करना एक ऐसी चीज है जो कई मोटर चालकों को थोड़े सफेद-गुच्छे में डाल सकती है, शायद अच्छे कारण के साथ: प्रत्येक वर्ष लगभग आधा मिलियन ट्रकिंग दुर्घटनाएं होती हैं।
लेकिन क्या होगा अगर ट्रक प्रतिक्रिया दे सकते हैं या अपने दम पर सड़क के खतरों से भी बच सकते हैं?
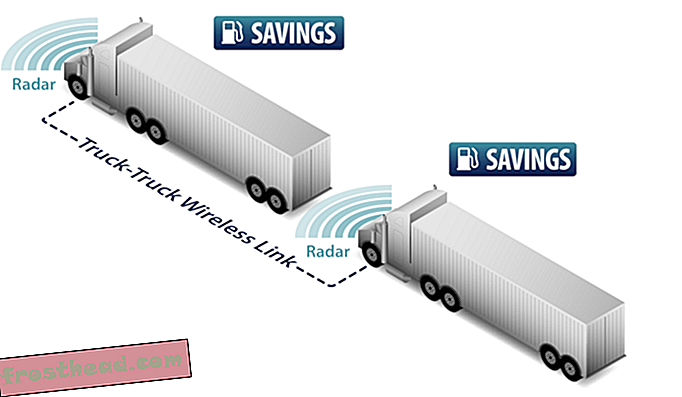
पेलोटन टेक्नोलॉजी, एक सिलिकॉन वैली स्टार्टअप, सड़कों को यात्री वाहनों और ट्रैक्टर-ट्रेलर के लिए सुरक्षित बना सकती है, बस एक नई प्रणाली के साथ जो ट्रकों को "पलटन" बनाती है, या अग्रानुक्रम में ड्राइव करती है, और स्वचालित रूप से आसन्न दुर्घटनाओं पर प्रतिक्रिया करती है।
इस प्रकार की ड्राइविंग, जिसे कभी-कभी झुंड के रूप में संदर्भित किया जाता है, यूरोप में वोल्वो और जापान में नई ऊर्जा और औद्योगिक प्रौद्योगिकी विकास संगठन द्वारा परीक्षण किए गए अन्य प्रोटोटाइप प्रणालियों के समान काम करती है।
यह "ड्राइवर रहित" आविष्कार नहीं है: ड्राइवर अपने हाथों को पहिया पर रखते हैं, क्योंकि सिस्टम स्टीयर नहीं करता है, और मुख्य चालक क्रूज़ नियंत्रण का उपयोग कर सकता है, या, स्वतंत्र रूप से गति या ब्रेक लगा सकता है। एक एकल ट्रक पर, सिस्टम बहुत से यात्री कारों में अनुकूली क्रूज नियंत्रण या सक्रिय ब्रेकिंग की तरह काम करता है। अगर ट्रैफिक आगे बढ़ता है, तो ट्रक धीमा हो जाएगा। यदि आगे सड़क पर अचानक कोई बाधा दिखाई देती है, तो ट्रक ब्रेक करेगा। जब सेमीफाइनल की एक जोड़ी को वायरलेस तरीके से जोड़ा जाता है - परिवहन विभाग द्वारा उस उद्देश्य के लिए एक रेडियो फ्रीक्वेंसी से अलग - दोनों एक साथ ब्रेक के लिए दिखाई देते हैं।
सिस्टम, जिसमें अभी तक कोई नाम या मूल्य नहीं है, मौजूदा ट्रैक्टर-ट्रेलरों पर वापस जा सकता है। ट्रकों की जरूरतों के लिए सिस्टम को ट्यून किया गया है; पेलोटन किसी भी अन्य उद्योग में इस समय दिलचस्पी नहीं है। लेकिन वाहन-से-वाहन संचार बड़े स्व-ड्राइविंग कार पारिस्थितिक तंत्र का हिस्सा है, जिसे स्वायत्त कारों से पहले समझ लेना होगा - जैसे कि Google द्वारा अनावरण किया गया - सुरक्षा सड़कों को नेविगेट कर सकता है।
"हमारे सिस्टम में, पीछे का एक ट्रक जो भी सामने वाला ट्रक है वह कर रहा है, " जोशुआ स्विट्स, पेलोटन के सीईओ कहते हैं। "सामने वाला ट्रक गति को नियंत्रित कर रहा है और ब्रेक लगा रहा है।"
स्विट्स के अनुसार, ये स्वचालित प्रणालियां एक मानव चालक की तुलना में अधिक तेज़ी से प्रतिक्रिया करती हैं।
"एक मानव आमतौर पर एक से दो सेकंड के भीतर प्रतिक्रिया करेगा, और यह सबसे अच्छी स्थिति में है। अगर कोहरा है तो यह ज्यादा लंबा हो सकता है। हम उस समय को 0.001 सेकंड तक नीचे लाते हैं। ”
यह वह गति है जो पेलोटन की प्रणाली को एक साथ दो ट्रकों को नियंत्रित करने की अनुमति देती है।
पेलोटन कार्यालयों में एक केंद्रीय संचालन केंद्र पहले यह निर्धारित करता है कि क्या ट्रक के लिए वर्तमान परिस्थितियों को पलटन की अनुमति है या नहीं। उदाहरण के लिए, सिस्टम किसी काफिले को शहर में या जब तेज बारिश या कोहरा नहीं होने देगा। उन मामलों में, ड्राइवर नियंत्रण बनाए रखेंगे।
सॉफ्टवेयर प्रत्येक ट्रक के आकार को भी ध्यान में रखता है। अधिक शक्तिशाली इंजन के साथ एक भारी ट्रक का नेतृत्व करेंगे। वाहन जो अपने ब्रेक को सबसे तेज़ी से लागू कर सकता है - लाइटर कार्गो के साथ एक, उदाहरण के लिए - हमेशा अनुसरण करेगा।
खुद ट्रकों पर हार्डवेयर बल्कि सरल है। प्रत्येक ट्रक के सामने लगे राडार सेंसर 800 फीट आगे तक सड़क की निगरानी करते हैं। वह डेटा ऑनबोर्ड कंप्यूटर को खिलाया जाता है, जो ट्रक के त्वरक और ब्रेक से जुड़ा होता है। ड्राइवरों में प्रत्येक के पास एक एलसीडी स्क्रीन है जो दूसरे के दृष्टिकोण को दिखाती है। पीछे वाले चालक के लिए, इसका मतलब है कि वह काफिले से आगे की सड़क देख सकता है; प्रमुख चालक के लिए, इसका मतलब है कि उसके नेत्रहीन स्थानों की दृश्यता।
"हम ट्रकों को करीब से रख सकते हैं, अगर लोग मैन्युअल रूप से गाड़ी चला रहे हों, तो सुरक्षित हो सकते हैं" स्विट्स कहते हैं। आमतौर पर, एक सुरक्षित दूरी लगभग 100 फीट होगी; पेलोटन ने लगभग 36 मील प्रति घंटे की गति से 36 के करीब ट्रकों का परीक्षण किया है।
इतनी कम दूरी पर यात्रा करने से ड्राफ्टिंग नामक तकनीक का उपयोग करके ईंधन अर्थव्यवस्था में सुधार करने में मदद मिलती है। साइकिल चालकों और रेस कार चालकों द्वारा सबसे अधिक इस्तेमाल किया जाता है, मसौदा एक अनुगामी वाहन को एक अग्रणी द्वारा जगा कटौती का लाभ लेने की अनुमति देता है। कम प्रतिरोध का मतलब है कि वाहन को उसी गति से जाने के लिए कड़ी मेहनत नहीं करनी है। पेलोटन ट्रक के पीछे जाने के लिए, इसका मतलब है कि लगभग 10 प्रतिशत कम ईंधन का उपयोग करना।
लीड ट्रक के लिए भी एक लाभ है। एक ट्रेलर के पीछे बड़ा फ्लैट ट्रक के पीछे कम दबाव का क्षेत्र बनाता है, जो वास्तव में ट्रक को पीछे की ओर खींच सकता है। पीछे एक दूसरा ट्रक होने से यह उस हवा को सुचारू बनाने में मदद करता है, जिससे कम दबाव वाला क्षेत्र छोटा हो जाता है, और इससे मुख्य ट्रक को लगभग 4 प्रतिशत कम ईंधन का उपयोग करने की अनुमति मिलती है, अन्यथा।
अन्य प्रोटोटाइप के विपरीत, पेलोटन सड़क तैयार होने के बहुत करीब है। क्योंकि ट्रकों में अभी भी मानव ड्राइवर हैं और मौजूदा सक्रिय-सुरक्षा प्रौद्योगिकी पर एक संस्करण का उपयोग करते हैं, उन्हें स्वायत्त वाहन नहीं माना जाता है। इसका मतलब है कि कंपनी Google परीक्षण ड्राइवर रहित कारों के लिए आवश्यक विशेष परमिट के बिना सार्वजनिक सड़कों पर उन्हें परीक्षण और तैनात कर सकती है। अब, कंपनी केवल दो ट्रकों के प्लेटो बनाने पर केंद्रित है, लेकिन पहले से ही सार्वजनिक राजमार्गों पर सफल परीक्षण के हजारों मील की दूरी पूरी कर चुकी है। हाल ही में, ट्रकों की एक जोड़ी ने रेनो, नेवादा के बाहर अंतरराज्यीय 80 पर खुले राजमार्ग के एक खंड को नेविगेट किया।
पेलोटन कुछ ट्रक बेड़े के साथ पायलट कार्यक्रम शुरू करेंगे, जिनमें से कोई भी वे वर्तमान में आने वाले महीनों में नाम के लिए स्वतंत्रता पर नहीं हैं। उनका उद्देश्य 2015 के मध्य में बेचने के लिए सिस्टम तैयार करना है।