यह पसंद है या नहीं, हम रोबोट से घिरे हैं। कारों में इन दिनों काम करने के लिए हजारों अमेरिकी सवारी करते हैं जो बहुत ज्यादा खुद ड्राइव करते हैं। वैक्यूम क्लीनर अपने दम पर हमारे रहने वाले कमरे के आसपास स्कूटर। Quadcopter ड्रोन स्वचालित रूप से खेत के खेतों पर जिप करते हैं, हवाई सर्वेक्षण करते हैं जो किसानों को उनकी फसल उगाने में मदद करते हैं। डरावने दिखने वाले ह्यूमनॉइड रोबोट भी, जो हमारे जैसे कूद और दौड़ सकते हैं, निकट भविष्य में व्यावसायिक रूप से उपलब्ध हो सकते हैं।
रोबोट के उपकरण हमारी तरफ से बिना किसी हस्तक्षेप के हमारी दुनिया में घूमने में बहुत अच्छे हो रहे हैं। लेकिन इन नए कौशल के बावजूद, वे अभी भी एक बड़ी कमजोरी के साथ आते हैं: गुच्छा के सबसे प्रतिभाशाली को अभी भी एक साधारण डॉकर्नोब द्वारा उनकी पटरियों में रोका जा सकता है।
कार्नेगी मेलन विश्वविद्यालय के एक रोबोटिक विशेषज्ञ मैट मेसन का कहना है कि यह समस्या यह है कि रोबोट की मौजूदा क्षमताओं को दुनिया भर में स्वायत्तता से स्थानांतरित करने के लिए, वे अभी तक भौतिक वस्तुओं के साथ सार्थक बातचीत नहीं कर सकते हैं।
“हमने रोबोटिक्स से क्या सीखा है? नंबर एक सबक यह है कि हेरफेर कठिन है। यह हमारे व्यक्तिगत अनुभव के विपरीत है, क्योंकि लगभग हर मानव एक कुशल मैनिपुलेटर है, ”हालिया समीक्षा लेख में मेसन लिखते हैं।
यह एक उचित बिंदु है। हम इंसान बिना सोचे-समझे अपने आसपास की दुनिया में हेरफेर करते हैं। हम हड़बड़ी, प्रहार, मोड़, काट और वस्तुओं को लगभग अनजाने में पकड़ लेते हैं, हमारे अविश्वसनीय रूप से निपुण हाथों के लिए धन्यवाद। परिणामस्वरूप, हमने अपनी दुनिया को उन उपांगों को ध्यान में रखकर बनाया है। सभी सेलफोन, कीबोर्ड, रेडियो और अन्य उपकरण जो हमने अपने पूरे जीवनकाल में संभाले हैं उन्हें स्पष्ट रूप से हमारी उंगलियों और हथेलियों में फिट करने के लिए डिज़ाइन किया गया है।
मौजूदा रोबोट के लिए ऐसा नहीं है। फिलहाल, सबसे व्यापक रूप से इस्तेमाल किए जाने वाले रोबोटिक हैंड डिज़ाइन में से एक, जिसे "ग्रिपर" कहा जाता है, 1960 के दशक में टीवी पर कल्पना करने वाले लोगों के लिए अधिक या कम समान है: दो कठोर धातु उंगलियों से बना एक उपकरण जो उनके बीच वस्तुओं को चुटकी में खींचता है।
एक असेंबली लाइन की तरह एक नियंत्रित वातावरण में, इन उपकरणों की तरह काम ठीक है। यदि कोई रोबोट जानता है कि हर बार वह किसी विशिष्ट हिस्से के लिए पहुंचता है, तो वह उसी स्थान और अभिविन्यास में होगा, फिर उसे तुच्छ समझना। "यह स्पष्ट है कि किस तरह का हिस्सा कन्वेयर बेल्ट से नीचे आने वाला है, जो रोबोट के लिए संवेदन और धारणा को अपेक्षाकृत आसान बनाता है, " स्टैनफोर्ड यूनिवर्सिटी के एक रोबोटिस्ट जीननेट बोहग ने नोट किया है।
दूसरी ओर, वास्तविक दुनिया, गन्दा और अज्ञात से भरा है। बस अपनी रसोई के बारे में सोचें: सिंक के बगल में सूखने वाले व्यंजनों के ढेर हो सकते हैं, फ्रिज में नरम और नाजुक सब्जियां और संकीर्ण बर्तनों में भरे कई बर्तन। एक रोबोट के दृष्टिकोण से, बोहग कहते हैं, वस्तुओं के उस विशाल सरणी की पहचान करना और हेरफेर करना पूरी तरह से अराजकता होगी।
“यह एक तरह से पवित्र कंघी बनानेवाले की रेती, सही है? कोलंबिया विश्वविद्यालय में एक रोबोटिक्स शोधकर्ता और मैकेनिकल इंजीनियर मेटी सियोकारेली का कहना है, अक्सर आप वस्तुओं की एक विस्तृत श्रृंखला में हेरफेर करना चाहते हैं, जिसे लोग आमतौर पर हेरफेर करते हैं, और लोगों द्वारा हेरफेर किया गया है। “हम विशिष्ट परिस्थितियों में विशिष्ट वस्तुओं के लिए जोड़तोड़ कर सकते हैं। वह कोई समस्या नहीं है। यह बहुमुखी प्रतिभा है जो कठिनाई है। ”
उन सामग्रियों की विशाल संख्या और भौतिक गुणों से निपटने के लिए - चाहे वे चाकू की तरह ठोस हों, या ख़राब हों, प्लास्टिक के टुकड़े की तरह - एक आदर्श रोबोट उपांग जरूरी कुछ ऐसा होगा जो सदृश होता है। हमारी बाहें। यहां तक कि कठोर हड्डियों के साथ, हमारे हाथ झुकते हैं और फ्लेक्स होते हैं क्योंकि हम वस्तुओं को पकड़ते हैं, इसलिए यदि कोई रोबोट का हाथ ऐसा कर सकता है, तो वह अपनी मुट्ठी के अंदर वस्तुओं को "पिंजरे" में रख सकता है, और उन्हें एक सतह पर चारों ओर घुमा सकता है, जैसे कि वह एक infin करता है। उसके खिलौने।
इंजीनियरिंग कि बहुमुखी प्रतिभा कोई छोटी उपलब्धि नहीं है। जब iRobot में इंजीनियरों - एक ही कंपनी है कि आप Roomba वैक्यूम क्लीनर लाया - कई साल पहले एक लचीला, तीन उंगलियों "हाथ" विकसित की है, यह एक प्रमुख उपलब्धि के रूप में स्वागत किया गया था। आज, रोबोटिक मानव हाथ की एक वफादार प्रतिकृति से दूर जाना जारी रखते हैं, स्क्विशी सामग्री की ओर देख रहे हैं और उन्हें नियंत्रित करने के लिए मशीन सीखने जैसे बेहतर कम्प्यूटेशनल उपकरण हैं।
नरम, लचीली "हाथों" की खोज
मिशिगन विश्वविद्यालय में स्वायत्त रोबोटिक हेरफेर का अध्ययन करने वाले दिमित्री बेरेनसन कहते हैं, "ह्यूमन लाइफ़ ग्रिपर बहुत अधिक नाजुक और बहुत अधिक महंगे होते हैं, क्योंकि आपके पास बहुत अधिक मोटर्स होते हैं और वे एक छोटी सी जगह में पैक होते हैं।" "वास्तव में, आपने इसे बनाने के लिए बहुत सारी इंजीनियरिंग की है, और बहुत सारे रखरखाव, आमतौर पर।" उन सीमाओं के कारण, वे कहते हैं, मौजूदा मानव-निर्मित हाथों का व्यापक रूप से उद्योग द्वारा उपयोग नहीं किया जाता है।
रोबोट का हाथ व्यावहारिक होने के लिए और यहां तक कि क्षमता में मनुष्य के करीब आने के लिए, उसे दृढ़ लेकिन लचीला होना होगा; उच्च संकल्पों पर ठंड, गर्मी और स्पर्श को महसूस करने में सक्षम होना; और नाजुक वस्तुओं को लेने के लिए पर्याप्त सौम्य हो लेकिन एक धड़कन को झेलने के लिए पर्याप्त मजबूत हो। ओह, और सब से ऊपर, यह सस्ता होना होगा।
इस समस्या के आसपास जाने के लिए, कुछ शोधकर्ता एक खुशहाल माध्यम बनाना चाहते हैं। वे हाथों का परीक्षण कर रहे हैं जो हमारे स्वयं के कुछ लक्षणों की नकल करते हैं, लेकिन डिजाइन और निर्माण के लिए बहुत सरल हैं। प्रत्येक एक नरम लेटेक्स "उंगलियों" का उपयोग करता है जो कण्डरा जैसी केबलों द्वारा संचालित होते हैं जो उन्हें खुले और बंद खींचते हैं। इस तरह के डिजाइनों का लाभ उनकी शाब्दिक लचीलापन है - जब वे एक वस्तु का सामना करते हैं, तो वे इसके चारों ओर स्क्विश कर सकते हैं, इसके जटिल आकार को बना सकते हैं, और इसे बड़े करीने से स्कूप कर सकते हैं।
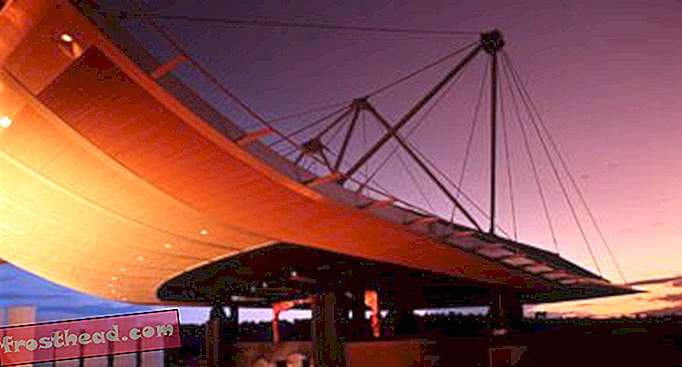
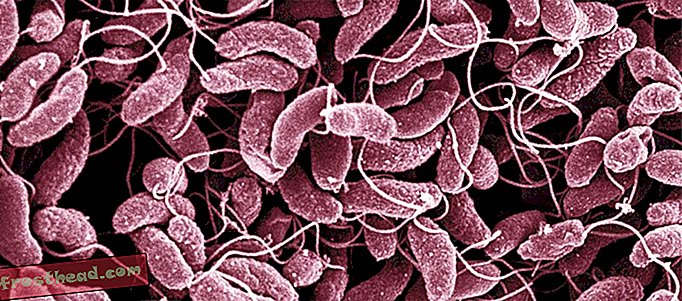
 हाथों के बजाय जो हमारे खुद को बारीकी से नकल करते हैं, कुछ शोधकर्ता सिलिकॉन से बने नरम, लचीले लोगों पर काम कर रहे हैं। इस छवि में, खोखले सिलिकॉन उंगलियों को कर्ल करते हैं क्योंकि वे हवा से भरे होते हैं, उन्हें असामान्य रूप से आकार की वस्तुओं के आसपास निचोड़ते हैं। (जे। MORROW ET AL / IEEE इंटरनेशनल कंबाइंड ऑन रॉबॉटिक्स एंड ऑटोमेशन (ICRI))
हाथों के बजाय जो हमारे खुद को बारीकी से नकल करते हैं, कुछ शोधकर्ता सिलिकॉन से बने नरम, लचीले लोगों पर काम कर रहे हैं। इस छवि में, खोखले सिलिकॉन उंगलियों को कर्ल करते हैं क्योंकि वे हवा से भरे होते हैं, उन्हें असामान्य रूप से आकार की वस्तुओं के आसपास निचोड़ते हैं। (जे। MORROW ET AL / IEEE इंटरनेशनल कंबाइंड ऑन रॉबॉटिक्स एंड ऑटोमेशन (ICRI)) ऐसे स्क्विशी "हाथ" एक कठिन धातु ग्रिपर पर एक बड़ा सुधार प्रदान करते हैं। लेकिन वे केवल मुद्दे को हल करना शुरू करते हैं। हालांकि एक रबड़ की उंगली सभी प्रकार की वस्तुओं को लेने के लिए बहुत अच्छा काम करती है, यह एक सिक्के में एक स्लॉट रखने जैसे सरल कार्यों के लिए आवश्यक ठीक मोटर कौशल के साथ संघर्ष करेगी - जिसमें न केवल सिक्का धारण करना शामिल है, बल्कि स्लॉट को महसूस करना, इसके किनारों से बचना, और सिक्के को अंदर खिसकाएं। उस कारण से, सियोकार्ली कहते हैं, सेंसर बनाने वाले जो रोबोटों को उन वस्तुओं के बारे में अधिक बताते हैं, जो पहेली का एक समान रूप से महत्वपूर्ण हिस्सा है।
हमारी अपनी उंगलियों में त्वचा के भीतर हजारों व्यक्तिगत स्पर्श रिसेप्टर्स होते हैं। "हम वास्तव में सेंसर के उन प्रकार का निर्माण करने के लिए पता नहीं है, और अगर हम किया था, हम भी उन्हें वायरिंग एक बहुत ही कठिन समय होता है और उस जानकारी को वापस मिल रहा है, " सिओकार्ली कहते हैं।
सेंसरों की सरासर संख्या एक दूसरी, यहां तक कि गुप्त मुद्दे को भी उठाएगी: एक बार आपके पास यह सब जानकारी के साथ क्या करना है। बेरेनसन कहते हैं कि कम्प्यूटेशनल तरीके जो एक रोबोट को अपने अगले कदम की योजना बनाने के लिए बड़ी मात्रा में संवेदी डेटा का उपयोग करने देते हैं, बेरेनसन कहते हैं। लेकिन उन क्षमताओं को प्राप्त करना जहाँ उन्हें स्वायत्त हेरफेर को प्राप्त करने में शोधकर्ताओं के सामने आने वाली अन्य सभी चुनौतियों का सामना करना पड़ सकता है। एक रोबोट का निर्माण जो अपने "हाथों" का उपयोग जल्दी और निर्बाध रूप से कर सकता है - यहां तक कि पूरी तरह से उपन्यास स्थितियों में भी - यह संभव नहीं हो सकता है जब तक कि इंजीनियर इसे जटिल बुद्धि के रूप में बंद नहीं कर सकते।
यह दिमागी ताकत है जो हममें से कई इंसानों को दी जाती है। हमारे डेस्क पर एक पेंसिल लेने के लिए, हम बस बाहर तक पहुँचते हैं और इसे पकड़ लेते हैं। रात का खाना खाते समय, हम अपने भोजन को अनुग्रह और सटीकता के साथ हथियाने के लिए चिमटे, कांटे और चीनी काँटा का उपयोग करते हैं। यहां तक कि ऊपरी अंगों को खोने वाले एम्प्यूटेस उन कार्यों के लिए प्रोस्थेटिक हुक का उपयोग करना सीख सकते हैं जिनके लिए ठीक मोटर कौशल की आवश्यकता होती है।
"वे अपने जूते बांध सकते हैं, वे एक सैंडविच बना सकते हैं, वे तैयार हो सकते हैं - सभी सबसे सरल तंत्र के साथ। तो हम जानते हैं कि अगर आपके पास इसके पीछे सही बुद्धि है, तो यह संभव है।
मशीन को पढ़ाना
बोहग कहते हैं कि रोबोट में बुद्धिमत्ता के उस स्तर को प्राप्त करने के लिए वर्तमान तरीकों में छलांग लगाने की आवश्यकता होती है, जिसका उपयोग शोधकर्ता करते हैं। हाल तक तक, अधिकांश हेरफेर सॉफ़्टवेयर में वास्तविक दुनिया की स्थितियों के विस्तृत गणितीय मॉडल का निर्माण शामिल है, फिर रोबोट को उन मॉडलों का उपयोग करने की अनुमति देता है जो इसकी गति की योजना बनाते हैं। उदाहरण के लिए, हाल ही में निर्मित रोबोट ने आईकेईए कुर्सी को इकट्ठा करने का काम सौंपा है, उदाहरण के लिए, एक सॉफ्टवेयर मॉडल का उपयोग करता है जो प्रत्येक व्यक्ति के टुकड़े को पहचान सकता है, यह समझ सकता है कि यह अपने पड़ोसियों के साथ कैसे फिट बैठता है, और इसकी तुलना अंतिम उत्पाद की तरह दिखता है। यह विधानसभा का काम लगभग 20 मिनट में पूरा कर सकता है। हालांकि, यह एक अलग Ikea उत्पाद को इकट्ठा करने के लिए कहें, और यह पूरी तरह से flummoxed होगा।
मनुष्य बहुत अलग तरह से कौशल विकसित करता है। एक एकल संकीर्ण विषय पर गहन ज्ञान रखने के बजाय, हम उदाहरण और अभ्यास से मक्खी पर ज्ञान को अवशोषित करते हैं, उस काम को मजबूत करते हैं, और जो नहीं करते हैं उन्हें खारिज करते हैं। पहली बार जब आप सीखते हैं कि आपने प्याज को कैसे काटना है - एक बार जब आपको पता चला कि चाकू को कैसे पकड़ना है और कुछ बार स्लाइस करना है, तो संभावना है कि जब आप आलू का सामना करते हैं तो खरोंच से शुरू नहीं होता है। तो ऐसा करने के लिए एक रोबोट कैसे मिलता है?
बोहग का मानना है कि उत्तर "मशीन लर्निंग" में निहित हो सकता है, एक प्रकार की पुनरावृत्ति प्रक्रिया जो रोबोट को यह समझने की अनुमति देती है कि कौन से हेरफेर प्रयास सफल हैं और कौन से नहीं हैं - और यह उस जानकारी का उपयोग करने में सक्षम बनाता है जो उन स्थितियों में कभी भी पैंतरेबाज़ी नहीं करता।
"मशीन सीखने से पहले रोबोटिक्स के क्षेत्र में प्रवेश किया, यह सब हेरफेर की भौतिकी मॉडलिंग के बारे में था - एक वस्तु और उसके पर्यावरण के गणितीय विवरण के साथ आ रहा है, " वह कहती हैं। "मशीन लर्निंग हमें रोबोट को उन वस्तुओं के उदाहरणों का एक समूह देता है, जिसे किसी ने एनोटेट किया है, यह दिखाते हुए, 'यहाँ एक जगह को हथियाना है।" "एक रोबोट इन पिछले डेटा का उपयोग पूरी तरह से नई वस्तु को देखने और समझने के लिए कर सकता है। इसे समझो।
यह विधि पिछली मॉडलिंग तकनीकों से एक बड़े बदलाव का प्रतिनिधित्व करती है, लेकिन यह कुछ समय पहले हो सकता है जब यह पर्याप्त परिष्कृत हो कि रोबोट पूरी तरह से अपने आप सीख सकें, बेलेन्सन कहते हैं। कई मौजूदा मशीन-लर्निंग एल्गोरिदम को संभावित परिणामों के बारे में बड़ी मात्रा में डेटा प्राप्त करने की आवश्यकता होती है - जैसे कि शतरंज के खेल में सभी संभावित चालें - इससे पहले कि वे हमले की सर्वोत्तम संभव योजना पर काम करना शुरू कर सकें। अन्य मामलों में, उन्हें सैकड़ों की आवश्यकता हो सकती है, यदि हजारों नहीं, तो किसी दिए गए ऑब्जेक्ट को हेरफेर करने के प्रयासों से पहले कि वे एक रणनीति पर काम करते हैं।
अगर एक रोबोट को स्थानांतरित करना है और दुनिया के साथ बातचीत करना है तो लोगों को जितनी जल्दी हो सके बदलना होगा। इसके बजाय, बेरेनसन कहते हैं, एक आदर्श रोबोट को परीक्षण और त्रुटि का उपयोग करके कुछ ही चरणों में नए कौशल विकसित करने में सक्षम होना चाहिए, या एक ही उदाहरण से नए कार्यों को एक्सट्रपलेशन करने में सक्षम होना चाहिए।
 इंजीनियर जीननेट बोहग द्वारा बनाया गया एक रोबोट अपोलो, एक सिलेंडर को टेबल के पार ले जाने की कोशिश करता है जबकि एक कार्डबोर्ड बॉक्स उसके रास्ते को अवरुद्ध कर देता है। इस प्रयोग में, एक शोधकर्ता ने हाथ को हिलाने के लिए बॉक्स को नए स्थानों पर स्थानांतरित कर दिया, जिससे अपोलो को मक्खी पर अपने प्रक्षेपवक्र को फिर से लगाने के लिए मजबूर होना पड़ा। निचले दाएं कोने में जंबल की गई छवि अपोलो के दृष्टिकोण से एक दृश्य दिखाती है, यह रेखांकित करता है कि एक रोबोट के लिए यह कितना कठिन है कि वह अपने आस-पास की वस्तुओं को पहचान और उनसे बातचीत कर सके। (कर्टसी जीन बोनट)
इंजीनियर जीननेट बोहग द्वारा बनाया गया एक रोबोट अपोलो, एक सिलेंडर को टेबल के पार ले जाने की कोशिश करता है जबकि एक कार्डबोर्ड बॉक्स उसके रास्ते को अवरुद्ध कर देता है। इस प्रयोग में, एक शोधकर्ता ने हाथ को हिलाने के लिए बॉक्स को नए स्थानों पर स्थानांतरित कर दिया, जिससे अपोलो को मक्खी पर अपने प्रक्षेपवक्र को फिर से लगाने के लिए मजबूर होना पड़ा। निचले दाएं कोने में जंबल की गई छवि अपोलो के दृष्टिकोण से एक दृश्य दिखाती है, यह रेखांकित करता है कि एक रोबोट के लिए यह कितना कठिन है कि वह अपने आस-पास की वस्तुओं को पहचान और उनसे बातचीत कर सके। (कर्टसी जीन बोनट) "एक बड़ा सवाल यह है कि हम एक रोबोट के मॉडल को 10 मिलियन उदाहरणों के साथ कैसे अपडेट करते हैं, लेकिन एक ?" "इसे एक बिंदु पर लाने के लिए जहां यह कहता है, 'ठीक है, यह काम नहीं किया, इसलिए मैं आगे क्या करूं?" मैं देख रहा हूँ कि असली सीखने का सवाल है। ”
मेसन, कार्नेगी मेलन के रोबोटिक, इससे सहमत हैं। रोबोट की प्रोग्रामिंग करने की चुनौती जिसे हम बिना दिमाग के करते हैं, वह कहता है, मोरवेक के विरोधाभास (रोबोटिक्स के अग्रणी हंस मोरेवेक, जो कार्नेगी मेलन में भी सिखाता है) के नाम से कुछ द्वारा अभिव्यक्त किया गया है। यह संक्षेप में कहा गया है कि मनुष्यों के लिए क्या करना मुश्किल है, अक्सर रोबोट द्वारा आसानी से नियंत्रित किया जाता है, लेकिन हमारे लिए दूसरी प्रकृति क्या है यह कार्यक्रम के लिए अविश्वसनीय रूप से कठिन है। एक कंप्यूटर उदाहरण के लिए, किसी भी व्यक्ति की तुलना में शतरंज को बेहतर तरीके से खेल सकता है - लेकिन इसे पहचानने और शतरंज के टुकड़े को अपने दम पर लेने के लिए इसे प्राप्त करना कठिन साबित हुआ है।
मेसन के लिए, यह अभी भी सच है। क्रमिक प्रगति के बावजूद, जो शोधकर्ता रोबोट नियंत्रण प्रणालियों पर बना रहे हैं, वह कहते हैं, स्वायत्त हेरफेर की मूल अवधारणा सबसे कठिन पागल में से एक हो सकती है जो अभी तक क्षेत्र को दरार करना है।
"तर्कसंगत, जागरूक सोच विकास में एक अपेक्षाकृत हाल ही में विकास है, " वे कहते हैं। “हमारे पास यह सब अन्य मानसिक मशीनरी है जो सैकड़ों लाखों वर्षों में अद्भुत चीजें करने की क्षमता विकसित करती है, जैसे कि लोकोमोशन, हेरफेर, धारणा। फिर भी वे सभी चीजें चेतन स्तर से नीचे हो रही हैं।
"हो सकता है कि जो सामान हम उच्च संज्ञानात्मक कार्य के रूप में सोचते हैं, जैसे शतरंज खेलना या बीजगणित करने में सक्षम होना - हो सकता है कि हेरफेर के यांत्रिकी की तुलना में वह सामान मृत तुच्छ हो।"
 नोबल पत्रिका वार्षिक समीक्षा से एक स्वतंत्र पत्रकारिता का प्रयास है।
नोबल पत्रिका वार्षिक समीक्षा से एक स्वतंत्र पत्रकारिता का प्रयास है।