मानव हाथ ने जिस तरह से इसे विकसित किया है, उसके लिए कई स्पष्टीकरण हैं। कुछ शोधकर्ता हमारे विरोधी अंगूठा को हमारे पूर्वजों की वस्तुओं को क्लब करने और दुश्मनों पर वस्तुओं को फेंकने या एक पंच को फेंकने की आवश्यकता से जोड़ते हैं, जबकि अन्य कहते हैं कि एक अद्वितीय जीन बढ़ाने वाला (डीएनए में प्रोटीन का एक समूह जो कुछ जीनों को सक्रिय करता है) हमारे शरीर रचना विज्ञान का नेतृत्व करता है। लेकिन ज्यादातर इस बात से सहमत हैं कि द्विपादवाद, बढ़े हुए दिमाग और औजारों के इस्तेमाल की जरूरत है।
फिर भी, हमारे हाथ जितना निपुण होते हैं, हमारे लिए मैसाचुसेट्स इंस्टीट्यूट ऑफ टेक्नोलॉजी के शोधकर्ताओं की एक टीम को लगता है कि हम बेहतर कर सकते हैं। इंजीनियरिंग के एक प्रोफेसर हैरी असादा ने एक कलाई में पहना जाने वाला रोबोट विकसित किया है जो एक व्यक्ति को केले को छीलने या एक बोतल को एक हाथ से खोलने की अनुमति देगा।
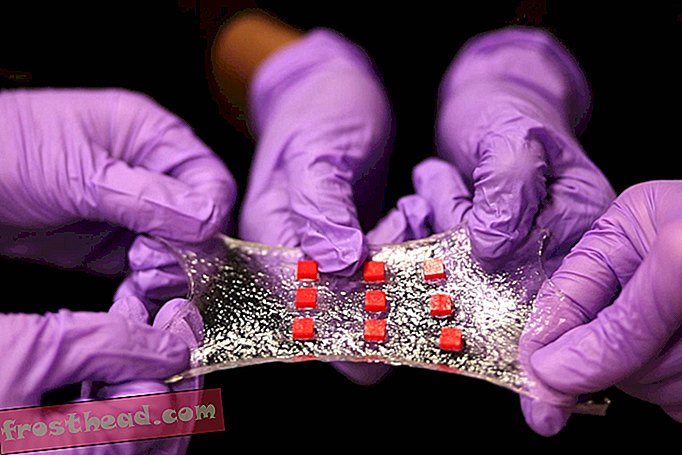
स्नातक छात्र फेय वू के साथ मिलकर, असादा ने रोबोट उंगलियों की एक जोड़ी का निर्माण किया, जो किसी व्यक्ति के स्वयं के अंकों को ट्रैक, नकल और सहायता करता है। दो अतिरिक्त उपांग, जो लम्बी प्लास्टिक सूचक उंगलियों की तरह दिखते हैं, एक कलाई कफ से जुड़ते हैं और अंगूठे और गुलाबी रंग के साथ विस्तारित होते हैं। तंत्र एक सेंसर-युक्त दस्ताने से जोड़ता है, जो मापता है कि किसी व्यक्ति की उंगलियां कैसे झुकती हैं और चलती हैं। एक एल्गोरिथ्म crunches कि आंदोलन डेटा और यह प्रत्येक रोबोट उंगली के लिए कार्यों में अनुवाद करता है।
जिस तरह से हमारे अपने पांच अंक चलते हैं उससे रोबोट एक सबक लेता है। मस्तिष्क से एक नियंत्रण संकेत हाथ में मांसपेशियों के समूहों को सक्रिय करता है। यह तालमेल, वू एक वीडियो प्रदर्शन में बताते हैं, व्यक्तिगत मांसपेशियों को संकेत भेजने की तुलना में बहुत अधिक कुशल है।
यह बताने के लिए कि अतिरिक्त उंगलियां कैसे चलेंगी, वू ने डिवाइस को अपनी कलाई से जोड़ा और पूरे लैब में वस्तुओं को हथियाना शुरू कर दिया। प्रत्येक परीक्षण के साथ, उसने मैन्युअल रूप से एक ऑब्जेक्ट पर रोबोट उंगलियों को तैनात किया, जो कि सबसे अधिक सहायक होगा- उदाहरण के लिए, सोडा की बोतल को दृढ़ करना, जबकि वह अपने हाथ का उपयोग शीर्ष पर ले जाने के लिए करता था। प्रत्येक उदाहरण में, उसने अपनी खुद की उंगलियों और अपने रोबोट समकक्ष के दोनों कोणों को रिकॉर्ड किया।
वू ने उस डेटा का उपयोग रोबोट के लिए ग्रिप पैटर्न का एक सेट स्थापित करने के लिए किया था और एक नियंत्रण एल्गोरिथ्म जो किसी दिए गए हाथ की स्थिति के आधार पर सही सहायता प्रदान करेगा।
जबकि रोबोट, जो केवल एक प्रोटोटाइप है, अपनी स्थिति को बदल सकता है, यह अभी तक मानव हाथ की ताकत या पकड़ की ताकत की नकल नहीं कर सकता है। वू ने एमआईटी न्यूज़ को बताया, "अन्य चीजें हैं जो एक अच्छी, स्थिर समझ बनाती हैं।" "एक ऐसी वस्तु के साथ जो छोटी दिखती है, लेकिन भारी होती है, या फिसलन भरी होती है, आसन समान होगा, लेकिन बल अलग होगा, इसलिए यह किस तरह से अनुकूल होगा?" अनुवाद बल अभी तक।
मशीन सीखने, या डेटा के आधार पर अपनी प्रक्रियाओं को अनुकूलित करने के लिए कंप्यूटर की क्षमता, सिस्टम को किसी दिए गए उपयोगकर्ता की प्राथमिकताओं को समायोजित करने की अनुमति दे सकती है। वू का कहना है कि वह रोबोट में इशारों की एक लाइब्रेरी को प्री-प्रोग्राम कर सकती है। जैसा कि कोई इसका उपयोग करता है, रोबोट के साथ सिंक होता है कि कैसे एक व्यक्ति वस्तुओं को पकड़ता है - हर कोई एक नारंगी को समान रूप से नहीं छीलता है, ठीक है? - और पकड़ प्रकारों को त्याग दें जो आमतौर पर उपयोग नहीं किए जाते हैं।
असदा का यह भी कहना है कि डिवाइस, अब बल्कि भारी है, आखिरकार इसे फोल्डेबल बनाया जा सकता है और इसके मौजूदा आकार का एक तिहाई हिस्सा। वह रोबोट के अंकों के साथ एक घड़ी बनाता है, जो जरूरत पड़ने पर दिखाई और वापस ले लेता है।
जबकि असादा और वू विकलांग लोगों के लिए अपने रोबोट की उपयोगिता देखते हैं, यह एक बड़े रोबोटिक्स आंदोलन का भी हिस्सा है जो सुपर-मानव विशेषताओं के साथ सक्षम उपयोगकर्ताओं को बंद करने का प्रयास करता है। एक अन्य एमआईटी प्रणाली, उदाहरण के लिए, वू के रोबोट के समान सिद्धांत पर काम करती है, लेकिन उंगलियों के बजाय अतिरिक्त हथियार जोड़ता है, जिससे पहनने वाले अपने हाथों से दरवाजे खोल सकते हैं या हथौड़ा मारते समय किसी वस्तु को स्थिर रख सकते हैं।
अधिकांश भाग के लिए, ये पहनने योग्य रोबोट ताकत जोड़ने के बारे में हैं। पेंसिल्वेनिया विश्वविद्यालय में छात्रों द्वारा विकसित TitanArm, इसके पहनने वाले को अतिरिक्त 40 पाउंड उठाने की अनुमति देता है। अधिक महत्वाकांक्षी सेटअप में पूर्ण एक्सोस्केलेटन शामिल होते हैं जो कभी भी आयरन मैन के करीब होते हैं। उदाहरण के लिए, दक्षिण कोरिया की कंपनी देवू शिपबिल्डिंग एंड मरीन इंजीनियरिंग में सूट के साथ शिपयार्ड कर्मचारी हैं जो उन्हें अपेक्षाकृत कम प्रयास के साथ धातु और लकड़ी के स्लैब को फहराने की अनुमति देते हैं।
इन सभी दृष्टिकोणों का सामान्य रूप से उपयोग करना कितना सरल है। उपयोगकर्ताओं को अपने रोबोट उपांगों में हेरफेर करने के लिए नियंत्रण योजनाओं को सीखने की आवश्यकता नहीं है, बल्कि अपने कार्यों के बारे में जाने के लिए, अपने रास्ते पर उनकी मदद करने के लिए एक एनिमेट्रोनिक स्पॉट्टर पर भरोसा करते हैं।