यह मनुष्यों के लिए काफी सामान्य है - विशेष रूप से जो निर्माण में काम करते हैं - एक गाँठ बाँधने के लिए, एक केबल को बंद करने के लिए, एक छेद में एक पिन डालें या ड्रिल जैसे हाथ उपकरण का उपयोग करें। वे सरल कार्यों की तरह लग सकते हैं, लेकिन वास्तव में बहुत जटिल हैं और इसमें बहुत अच्छी उंगली और हाथ की गति शामिल है।
संबंधित सामग्री
- कैसे रोबोट ने लैब को छोड़ दिया और इंसानों की मदद करना शुरू कर दिया
हालांकि रोबोट फैक्ट्री के काम में और सेवा उद्योग और स्वास्थ्य देखभाल सहित अन्य प्रकार की नौकरियों में अधिक से अधिक शामिल हो रहे हैं - उनकी निपुणता लगभग प्रभावशाली नहीं है। चूंकि लोगों ने पहली बार उन्हें 50 साल से अधिक पहले ऑटोमोटिव कारखानों में काम करने के लिए लाया था, हमने ऐसे रोबोट बनाए हैं जो भागों को अच्छी तरह से वेल्ड, पेंट और इकट्ठा कर सकते हैं। आज के सर्वश्रेष्ठ रोबोटिक हाथ परिचित वस्तुओं को उठा सकते हैं और उन्हें अन्य स्थानों पर ले जा सकते हैं - जैसे कि गोदाम के डिब्बे से उत्पाद लेना और उन्हें बक्से में रखना।
लेकिन रोबोट एक हाथ उपकरण को ठीक से उन्मुख नहीं कर सकते हैं - कहते हैं, एक पेंच पर खांचे के साथ फिलिप्स सिर पेचकश को अस्तर, या एक नाखून पर एक हथौड़ा का लक्ष्य। और वे निश्चित रूप से विस्तृत तरीके से दो हाथों का उपयोग नहीं कर सकते हैं, जैसे कि रिमोट कंट्रोल में बैटरी को बदलना।
मानव हाथ उन कार्यों में उत्कृष्ट हैं और बहुत कुछ। यहां तक कि प्रतिद्वंद्वी के करीब आने के लिए जो हमारे हाथ आसानी से सक्षम हैं, रोबोट के हाथों को बेहतर चपलता, विश्वसनीयता और ताकत की आवश्यकता होती है - और उन्हें अधिक सटीक रूप से समझ पाने और इससे भी अधिक सूक्ष्म रूप से आगे बढ़ने में सक्षम होने की जरूरत है, यह पता लगाने के लिए कि वे क्या करते हैं ' फिर से पकड़ना और इसे कैसे पकड़ना सबसे अच्छा है। रोबोट मनुष्यों के साथ काम करने में सक्षम होने के लिए, हमें यह पता लगाना होगा कि ऐसे रोबोट कैसे बनाए जा सकते हैं जो सचमुच हमारे एक हाथ से उधार दे सकते हैं जब हमारे अपने दो पर्याप्त नहीं हैं।
नॉर्थईस्टर्न यूनिवर्सिटी में मेरा शोध समूह सिर्फ ऐसा करने पर काम कर रहा है, विशेष रूप से नासा के वाल्कीरी जैसे ह्यूमनॉइड रोबोटों के लिए, जिनकी तीन उंगलियां हैं और प्रत्येक हाथ पर एक अंगूठा है। प्रत्येक अंक में गुदगुदी जैसे जोड़ होते हैं, और प्रत्येक हाथ में एक कलाई होती है जो आसानी से घूम सकती है। हम गति बनाने पर काम कर रहे हैं - हाथ, कलाई, उंगली और अंगूठे के आंदोलनों के संयोजन जो सामूहिक रूप से एक कार्य को पूरा करते हैं, जैसे कि बोल्ट को कसने के लिए एक सर्कल में एक रिंच को स्थानांतरित करना, या एक गाड़ी को दूसरी जगह से खींचना।
 इनमें से प्रत्येक औद्योगिक रोबोट में कई विशेष उपकरण हैं। क्या उनके कई कार्य रोबोट के हाथों से हो सकते हैं? (स्टीव जुर्वेत्सन / फ़्लिकर, सीसी बाय)
इनमें से प्रत्येक औद्योगिक रोबोट में कई विशेष उपकरण हैं। क्या उनके कई कार्य रोबोट के हाथों से हो सकते हैं? (स्टीव जुर्वेत्सन / फ़्लिकर, सीसी बाय) हाथों का महत्व
प्रत्येक रोबोट को बहुत विशिष्ट कार्य के अनुरूप कस्टम मशीन बनाने के बजाय, हमें बहु-उपयोग वाले रोबोट, या ऐसी सक्षम मशीनों को डिजाइन करने की आवश्यकता होती है, जिन्हें वे "सामान्य उद्देश्य" कह सकते हैं - लगभग किसी भी कार्य के लिए अच्छा। इस प्रकार के रोबोट की सफलता में एक महत्वपूर्ण भूमिका उत्कृष्ट हाथों की होगी।
हमारा काम सटीक ठीक आंदोलनों और स्वायत्त लोभी के लिए अनुकूल अनुकूल रोबोट हाथों की एक नई कक्षा को डिजाइन करने पर केंद्रित है। जब रोबोट नाखूनों में हथौड़ा करने, बैटरी बदलने और अन्य समान आंदोलनों को बनाने में सक्षम होते हैं - मनुष्यों के लिए बुनियादी लेकिन रोबोट के लिए बहुत जटिल - हम रोबोट के हाथों में मानव जैसी निपुणता के लिए हमारे रास्ते पर अच्छी तरह से होंगे।
इस लक्ष्य को प्राप्त करने में नए डिजाइनों का आविष्कार करना भी शामिल है जो कठोर और नरम तत्वों को शामिल करते हैं - जिस तरह से मानव हड्डी एक पकड़ को ताकत देती है, त्वचा पर दबाव फैलाने के साथ इसलिए शराब का गिलास चकनाचूर नहीं होता है।
तेजी से विकास और परीक्षण
आधुनिक तकनीकी सुधार विकास प्रक्रिया को आसान बना रहे हैं। 3 डी प्रिंटिंग के साथ, हम प्रोटोटाइप बहुत जल्दी बना सकते हैं। हम तंत्र के विभिन्न व्यवस्थाओं को आजमाने के लिए कम लागत वाले डिस्पोजेबल घटक भी बना सकते हैं, जैसे कि साधारण पिक-एंड-टास्क के लिए दो-या तीन-उंगलियों वाले ग्रिपर या अधिक नाजुक संचालन के लिए एन्थ्रोपोमोर्फिक रोबोट हाथ।
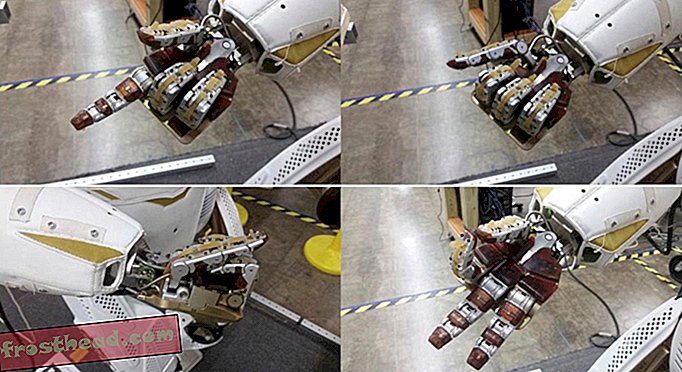 नासा Valkyrie रोबोट पर विभिन्न प्रकार के हाथ। (नॉर्थईस्टर्न यूनिवर्सिटी, CC BY-ND)
नासा Valkyrie रोबोट पर विभिन्न प्रकार के हाथ। (नॉर्थईस्टर्न यूनिवर्सिटी, CC BY-ND) जैसे ही इलेक्ट्रॉनिक कैमरे और सेंसर छोटे होते हैं, हम उन्हें नए तरीकों से शामिल करने में सक्षम होते हैं। उदाहरण के लिए, यदि हम एक रोबोटिक हाथ में दबाव सेंसर और कैमरे लगाते हैं, तो वे रोबोट कंट्रोलर (चाहे मानव या स्वचालित) पर प्रतिक्रिया दे सकते हैं जब एक पकड़ सुरक्षित होती है, या अगर कुछ फिसलने लगता है। एक दिन वे समझ सकते हैं कि फिसलती हुई वस्तु किस दिशा में जा रही है, इसलिए रोबोट उसे पकड़ सकता है।
ये क्षमता पहले से ही मनुष्यों के लिए दूसरी प्रकृति है जो दृष्टि और भविष्यवाणियों के माध्यम से है (शरीर के अंगों की सापेक्ष स्थिति को समझने की क्षमता या इसके बारे में सोचने के बिना)। एक बार जब हम उन्हें रोबोट में प्राप्त करने में सक्षम हो जाते हैं, तो वे ऐसी चीजों का पता लगाने में सक्षम होंगे कि क्या कोई समझ बहुत मजबूत है और किसी वस्तु को बहुत मुश्किल से निचोड़ रही है।
समन्वित आंदोलनों की योजना बनाना
एक और मील का पत्थर रोबोट के लिए तरीकों का विकास कर रहा होगा ताकि यह पता लगाया जा सके कि वास्तविक समय में उन्हें किस गति की आवश्यकता है, जिसमें यह संवेदन भी शामिल है कि प्रत्येक क्षण उनके हाथों में क्या चल रहा है। यदि कोई रोबोट हाथ उन वस्तुओं में परिवर्तन का पता लगा सकता है जो उन्हें संभाल रही है, या उन्हें पकड़ते समय वस्तुओं में हेरफेर करती है, तो वे उन सामान्य मैनुअल कार्यों जैसे कि गाँठ बांधने और तार-अलग करने में मदद कर सकते हैं।
एक साथ दो हाथों से काम करना भविष्य में और भी दूर है, हालांकि यह विशेष रूप से विनिर्माण के लिए एक महत्वपूर्ण बढ़ावा देगा। एक रोबोट जो दो हाथों से एक ड्रिल का संचालन कर सकता है या मशीन के पुर्जे को एक हाथ से दूसरे हाथ में चला सकता है, वह बड़ा सुधार होगा, जिससे कारखानों को अपनी प्रक्रियाओं में और भी अधिक कदमों को स्वचालित करने की अनुमति मिलती है।
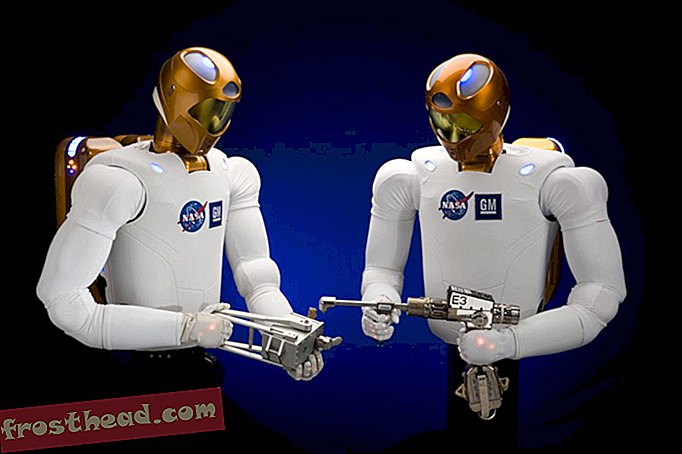 क्या यह भविष्य का रोबोट है? (नासा)
क्या यह भविष्य का रोबोट है? (नासा) हम मनुष्यों ने अभी तक इन प्रणालियों को विकसित नहीं किया है। मानव की तरह स्वायत्त रोबोट की निपुणता हासिल करने से रोबोटिक्स के शोधकर्ताओं, प्रौद्योगिकीविदों और नवप्रवर्तनकर्ताओं को भविष्य के भविष्य में व्यस्त रखा जाएगा। यह विनिर्माण में चल रही रोबोटिक्स क्रांति को धीमा नहीं करेगा, क्योंकि सुरक्षा, गति और गुणवत्ता में सुधार के लिए वर्तमान प्रक्रियाओं में अभी भी स्वचालन के लिए बहुत जगह है। लेकिन जैसा कि हम रोबोट को और बेहतर बनाते हैं, वे हमें एक हाथ देने में सक्षम होंगे।
यह आलेख मूल रूप से वार्तालाप पर प्रकाशित हुआ था।
तस्कीन पादिर, पूर्वोत्तर विश्वविद्यालय के इलेक्ट्रिकल और कंप्यूटर इंजीनियरिंग के एसोसिएट प्रोफेसर