जब आप किसी चीज को पकड़ते हैं, तो आपका हाथ ज्यादातर काम करता है। आपका मस्तिष्क बस यही कहता है, "जाओ, तुम चिंता मत करो कि यह कैसे होता है।" लेकिन एक कृत्रिम, यहां तक कि सबसे उन्नत के साथ, उस कार्रवाई को बहुत अधिक इरादे की आवश्यकता होती है। नतीजतन, कई रोगी अपने अत्याधुनिक अंगों को त्याग देते हैं।
संबंधित सामग्री
- हैकिंग न्यूरल नेटवर्क कैसे मदद कर सकता है Amputees Flawlessly एक अंडा दरार
- प्रोस्थेटिक इज इज़ ईज़ी, कम्पेयरिंग टू डू इट टू डू व्हाट यू वांट
आधुनिक प्रोस्थेटिक्स उन मांसपेशियों से विद्युत संकेतों के रूप में कमांड प्राप्त करते हैं जिनसे वे जुड़े होते हैं। लेकिन सबसे अच्छा प्रोस्थेटिक्स भी अभी तक बहुत कुछ नहीं कर सकता है। अंग की आदत डालने के लिए उपयोगकर्ताओं को एक लंबी प्रशिक्षण अवधि की आवश्यकता होती है। वे अक्सर केवल सीमित तरीकों से आगे बढ़ सकते हैं, और उपयोगकर्ताओं को विभिन्न कार्यों को पूरा करने के लिए पकड़ के बीच मैन्युअल रूप से स्विच करने की आवश्यकता होती है - कहते हैं, एक दरवाजा बनाम चुटकी खोलने के लिए और एक कुंजी चालू करें। सभी के सभी, इसका मतलब है कि हाथ मस्तिष्क के साथ मूल रूप से काम नहीं कर सकता है।
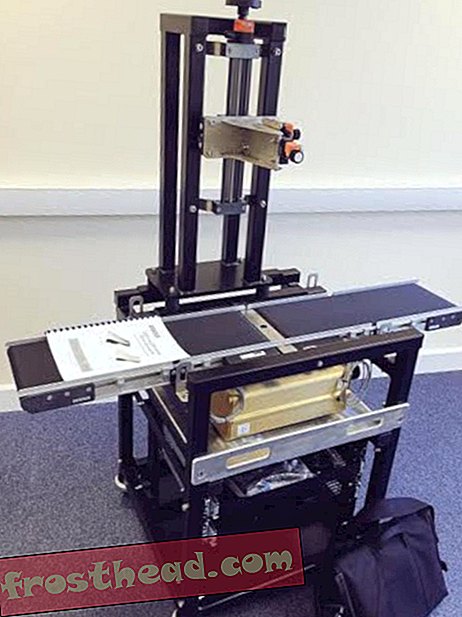
एक उपकरण जो इस समस्या को हल करने में मदद कर सकता है वह है कंप्यूटर विज़न। न्यूकैसल यूनिवर्सिटी के शोधकर्ताओं ने एक प्रोस्थेटिक हाथ पर एक वेब कैमरा लगाया, इसे एक गहन शिक्षण तंत्रिका नेटवर्क से जोड़ा और दो एम्प्यूट को उपकरण दिए जिनकी बाहें कलाई से ऊपर लेकिन कोहनी के नीचे से उभरी हुई थीं। कंप्यूटर ने कैमरे का उपयोग यह देखने के लिए किया कि उपयोगकर्ता किस चीज़ के लिए पहुंच रहा है और स्वचालित रूप से प्रोस्थेटिक की पकड़ को समायोजित करता है।
अब तक के परिणाम आशाजनक रहे हैं। जर्नल ऑफ न्यूरल इंजीनियरिंग के एक लेख में, न्यूकैसल की टीम ने बताया कि उपयोगकर्ताओं को वस्तुओं को लेने और स्थानांतरित करने के लिए सफलता दर 80 प्रतिशत से ऊपर थी।
न्यूकैसल में पीएचडी के छात्र और पेपर के मुख्य लेखक गज़ल ग़ज़ाई कहते हैं, "अगर हम इसमें सुधार कर सकते हैं, तो सौ प्रतिशत प्राप्त करें, यह बहुत अधिक विश्वसनीय होगा कि आप amputees के लिए हाथ का उपयोग करें।" वास्तविक जीवन में उपयोग किया जाता है, यह त्रुटिहीन होना चाहिए। ”
डिवाइस स्वयं एक ऑफ-द-शेल्फ प्रोस्थेटिक था जिसे आई-लिम्ब अल्ट्रा कहा जाता था, और वेबकैम एक कम-रिज़ॉल्यूशन, सस्ती लॉजिटेक क्विकचैम चैट था। वास्तविक नवाचार यह था कि कैसे ग़ज़ाई की टीम ने वेब कैमरा से जानकारी का उपयोग करने के लिए एक कंप्यूटर सीखने की योजना तैयार की।
सॉफ्टवेयर को उठाए जाने वाले ऑब्जेक्ट के आकार में पैटर्न को पहचानता है और उन्हें पकड़ के आधार पर श्रेणियों में वर्गीकृत करता है जो उन्हें प्रभावी रूप से समझने की आवश्यकता होती है। कंप्यूटर को यह तकनीक सिखाने के लिए, ग़ज़ाई ने प्रत्येक में, २ चित्र खिलाए, ५०० डिग्री के ५ डिग्री के वेतन वृद्धि में लिए। सॉफ्टवेयर अपनी विशेषताओं द्वारा वस्तुओं को फ़िल्टर करता है, और परीक्षण और त्रुटि के माध्यम से सीखता है कि कौन सी श्रेणियां किस श्रेणी में आती हैं।
फिर, जब कृत्रिम वस्तु को किसी वस्तु के साथ प्रस्तुत किया जाता है, तो नेटवर्क उसके व्यापक, सार आकार के आधार पर कम रिज़ॉल्यूशन वाली छवि को वर्गीकृत करता है। यह कुछ ऐसा नहीं होना चाहिए जिसे सिस्टम ने पहले देखा हो — वस्तु का सामान्य आकार हाथ को यह बताने के लिए पर्याप्त है कि किस ग्रिप का उपयोग करना है। ग़ज़ाई और टीम ने चार पकड़ प्रकारों का इस्तेमाल किया, जिसमें चुटकी (दो उंगलियाँ), ट्राइपॉड (तीन उंगलियाँ), न्यूट्रल पामर (जैसे एक कॉफी कप को पीसना), और उच्चारित पामर (जहाँ हथेली नीचे की ओर होती है) का इस्तेमाल किया।
प्रोस्थेटिक्स और औद्योगिक रोबोट दोनों में कंप्यूटर दृष्टि का उपयोग पहले रोबोटिक हाथों पर किया गया है। लेकिन इस तरह के प्रयासों में या तो मानक आकार और आकार की वस्तुओं को शामिल किया गया है, जैसा कि विनिर्माण वातावरण, या धीमी एल्गोरिदम में। न्यूकैसल में विकसित की गई प्रणाली इस प्रक्रिया से तेजी से गुजरने में सक्षम थी कि वह 450 माइक्रोसेकंड में वस्तुओं को सही ढंग से वर्गीकृत कर सके, या एक सेकंड के 1/2000 वें हिस्से के आसपास। "मुख्य अंतर समय है कि यह समझ प्रदान करने और कार्य करने के लिए समय लगता है, " ग़ज़ाई कहते हैं। “उनमें से कुछ के लिए यह चार सेकंड के बारे में है, और उनमें से कुछ को कई स्नैपशॉट की आवश्यकता है। हमारे लिए, यह सिर्फ एक स्नैपशॉट है और यह बहुत तेज़ है। ”
इस तकनीक के प्रभाव घरेलू वस्तुओं को लेने से बहुत आगे निकल जाते हैं। इमेजिंग सिस्टम प्रोस्थेटिक पैरों को यह जानने में मदद कर सकते हैं कि वे जमीन से कितनी दूर हैं, और उदाहरण के लिए समायोजित करें। दोनों उदाहरणों में सामान्य रूप से एक रोबोट प्रणाली है जो मस्तिष्क के साथ मिलकर काम कर रही है।
इम्पीरियल कॉलेज लंदन में न्यूरोरेहेबलीस इंजीनियरिंग के प्रोफेसर डारियो फारिना कहते हैं, "मुख्य विचार रोबोटिक डिवाइस और मानव के बीच बातचीत करना है, जो रोबोटिक सिस्टम में कुछ खुफिया जानकारी देता है।" उन उपकरणों को जो वे कनेक्ट करते हैं।
"यह न केवल रोगी है जो अपने मस्तिष्क के साथ और तंत्रिका इंटरफ़ेस, कृत्रिम अंग के माध्यम से नियंत्रित करता है, बल्कि यह भी है कि रोगी को एक दूसरे बुद्धिमान इकाई द्वारा मदद की जाती है, जो कृत्रिम अंग पर चढ़ा हुआ है और जो पर्यावरण को देख सकता है, " फारनिया कहती हैं, जो न्यूकैसल अध्ययन में शामिल नहीं थीं। "इसमें मुख्य चुनौती वास्तव में मानव और खुफिया तंत्र के बीच नियंत्रण को साझा करने में सक्षम होना है।"
यह मस्तिष्क के साथ कृत्रिम बुद्धिमत्ता के विलय में एक प्रारंभिक संकेत है, यह बताती है कि संघर्ष पैदा किए बिना प्रत्येक के लिए कौन से कार्य सर्वोत्तम हैं। ग़ज़ाई ने इस समस्या का सामना किया है; वह अभी भी यह प्रबंधित करने के लिए काम कर रही है कि वेश्या के कंप्यूटर, उपयोगकर्ता के कार्यों के द्वारा व्यापक गति को कितना नियंत्रित किया जाता है। अभी, उपयोगकर्ता आइटम पर प्रोस्थेटिक को इंगित करता है, इसे फोटो लेने के लिए प्रेरित करता है, और फिर हाथ पकड़ और पकड़ लेता है।
यह कई शेष चुनौतियों में से एक है। अभी, सिस्टम लंबी वस्तुओं को समझ नहीं सकता है जो दृश्य से बाहर हैं। यह भीड़ पृष्ठभूमि के साथ परेशानी है। कभी-कभी यह एक दूर की वस्तु को एक छोटे, निकट के रूप में व्याख्या करता है। और ग़ज़ाई कहते हैं कि प्रकारों की संख्या 10 या 12 तक बढ़ाना एक और लक्ष्य है। लेकिन पहले से ही, वह कहती है, परीक्षण में दो उपयोगकर्ताओं ने प्रदर्शन में वृद्धि की सराहना की और सादगी यह कुछ लेने के मूल कार्य को उधार देती है।